,Robots have been used in different fields such as industry, home, hospitals, education and entertainment (Feil-Seifer & Matarić, 2011), and their appearance can influence the user's preferences and acceptance (Katz & Halpern, 2014), and a good appearance can facilitate the degree of human-robot interaction (Złotowski, 2015).Traditional research on shape preference formation has mostly used questionnaires or interviews, which are susceptible to subjective bias (Hwang et al., 2013).
In order to gain a more objective understanding of how users form preferences for the appearance of humanoid robots, ERP and spectral perturbation methods in EEG technology can be employed to explore the neurodynamic mechanisms behind the formation of user preferences for humanoid robots and provide designers with a method for objectively assessing user preferences (Guo, Li & Duffy, 2022).
Thirty-three college students (M: 16, F: 17) were recruited, with a mean age range of 19-25 years (mean age = 21.67, SD = 1.797).
,Screening and categorization of stimulus materials:
Three Ph.D. students proficient in robotics and ergonomics research were invited to collect pictures of the appearance of humanoid robots. Ten participants were then recruited to rate the appearance preferences of these robots on a 7-point scale, and the humanoid robots with the top and bottom ten scores were finally categorized into Preferred and Non-Preferred as in Figure 1.
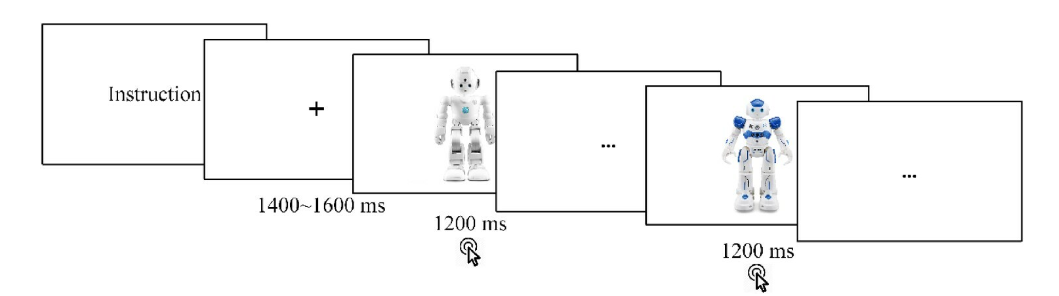
Two types of humanoid robot pictures, preferred and non-preferred, were randomly presented on the computer screen, and the participants were asked to judge whether they preferred the presented humanoid robot pictures by pressing a key, as shown in Figure 2, during which the subjects' EEG was recorded.
The ERP results are as follows:
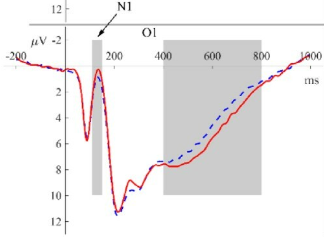
1.Repeated-measures ANOVA results revealed that user preference for the appearance of the humanoid robot had a significant effect on the N1 component of the occipital region O1, with the preferred appearance inducing a greater negative amplitude than the non-preferred appearance, as in Figure 3.
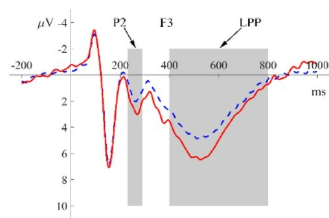
2. User preference for the appearance of the humanoid robot had a significant effect on the P2 component and the LPP component of the frontal region F3. Preferred appearance evoked greater P2 and LPP amplitudes than non-preferred appearance, as in Figure 4.
It is well known that N1 is related to the allocation of attentional resources in perceptual processing and can reveal the allocation of attention inherent in preference formation, where the physical characteristics of the preferred appearance can attract users and produce an intrinsic positive effect, which can elicit more attention at an early stage and enhance the negative deflection of the N1 component.
P2 relates to the rapid detection of stimulus physical characteristics, with preferred robots positively influencing the formation of user preferences and driving automated functional detection in which more attentional resources are captured due to their more appealing external physical characteristics.
LPP is related to the ongoing allocation of attentional resources and is subject to top-down modulation, whereby participants allocate more attention to the positive effects of the preferred humanoid robot's extrinsic physical characteristics and generate greater LPP amplitudes through top-down modulation as they assess the humanoid robot's appearance and judge their preferences.
At early stages, the preferred humanoid robot appearance elicited greater EEG amplitude changes in occipital area N1 and frontal area P2 than the non-preferred appearance. At later stages, the preferred humanoid robot appearance elicited greater LPP in frontal regions than the non-preferred appearance.This suggests a unique neurodynamic dual stage in the formation of user preferences for the appearance of humanoid robots.ERP studies in EEG can provide designers with an objective way to assess user preferences for the appearance of humanoid robots.
Feil-Seifer, D., & Matarić, M. J. (2011). Socially assistive robotics. IEEE Robotics & Automation Magazine, 18(1), 24-31. doi: 10.1109/MRA.2010.940150.
Katz, J. E., and D. Halpern. 2014. "Attitudes Towards Robots Suitability for Various Jobs as Affected Robot Appearance." Behaviour & Information Technology 33 (9): 941-953. doi:https://doi.org/10.1080/0144929x.2013.783115
Złotowski, J., D. Proudfoot, K. Yogeeswaran, and C. Bartneck. 2015. "Anthropomorphism: Opportunities and Challenges in Human -Robot Interaction." International Journal of Social Robotics 7 (3): 347-360. doi:https://doi.org/ 10.1007/s12369-014-0267-6
Hwang, J., T. Park, and W. Hwang. 2013. "The Effects of Overall Robot Shape on the Emotions Invoked in Users and the Perceived Personalities of Robot." Applied Ergonomics 44 (3): 459-471. doi:https://doi.org/10.1016/j.apergo.2012.10.010
Fu Guo, Mingming Li, Jiahao Chen & Vincent G. Duffy (2022) Evaluating users' preference for the appearance of humanoid robots via event- related potentials and spectral perturbations, Behaviour & Information Technology, 41:7, 1381-1397, DOI: 10.1080/0144929X.2021.1876763
Beijing Everloyal technology co., LTDIt is invested by Zhongke (Guangdong) Science Group, relying on Guangdong Human Factors Technology Research Institute and Wuhan Human Factors Engineering Technology Research Institute, and is a new type of high-tech enterprise based on the direction of psychological human factors, driving human factors, biomechanics, user experience, virtual reality and other directions, integrating production, research and development, sales and technical services, and has been selected as a national high-tech enterprise, a science and technology-based small and medium-sized enterprise, and a high-tech enterprise on the list of Zhongguancun. High-tech enterprise list.
The driving human factors system, virtual reality graphical editing software, light environment psychological assessment system and psychological and human factors experimental teaching system developed by Hengzhi Technology have entered the domestic market.
As the sole agent of Poland Cortivision NIR, Russia Mitsar EEG in China, the sole agent of Italy BTS surface EMG and other biomechanical and gait analysis products in China, and the sole agent of Netherlands Noldus Behavioral Science, Sweden Tobii Eye Motion Instrument, Netherlands MindMedia Physiology and Biofeedback, US Biopac Physiology, US ETT The domestic licensed agent of products such as olfactory/taste stimulator. The high-tech products operated have served the top universities and the highest level of scientific research units in China, including Tsinghua University, Beijing Normal University, Northeast Normal University, Yanshan University, Qiyuan Laboratory, Xi'an University of Architecture and Technology, Northwest Agriculture and Forestry University of Science and Technology, Shenzhen University of Technology, Xi'an University of Science and Technology, Shanghai University, the Second Institute of Aerospace, 27 and 28 of China Electronics Technology Group, while providing technical support for ink Netease, Huawei technology to provide technical support, in the field of talent training, scientific research cooperation, transformation of results and other scientific and technological areas of continuous in-depth cooperation.
This article comes from the WeChat public number: EVERLOYAL



























{kind=link}
{kind=link}
{kind=link}
{kind=link}