








































Professor Shuguang Kuai's team at East China Normal University has used virtual reality combined with computational modeling to skillfully quantify human social walking behavior and further designed an algorithm based on human behavioral characteristics, significantly improving the anthropomorphic nature of robots and human-robot interaction experience, effectively solving the problem of integrating robots into social scenarios, building a link between human behavior theory and navigation algorithms, and realizing the This work is a leap from concepts and models to algorithms in human social mobility theory. This cross-cutting scientific research spanning humanities, science and engineering was published in the leading international computer science journal Nature - Machine Intelligence (Nature Machine Intelligence) was published on.

How can robots enable high-quality social interaction?
With the advent of the smart era, service robots are increasingly coming into human life and are expected to become the right-hand man of human life. How to make robots more human, better understand people and have high-quality social interactions with them has become a key and difficult problem in the field of service robots. To solve this challenge, theoretical concepts of human social interaction behavior need to be translated into algorithms that can be implanted into robotic platforms.
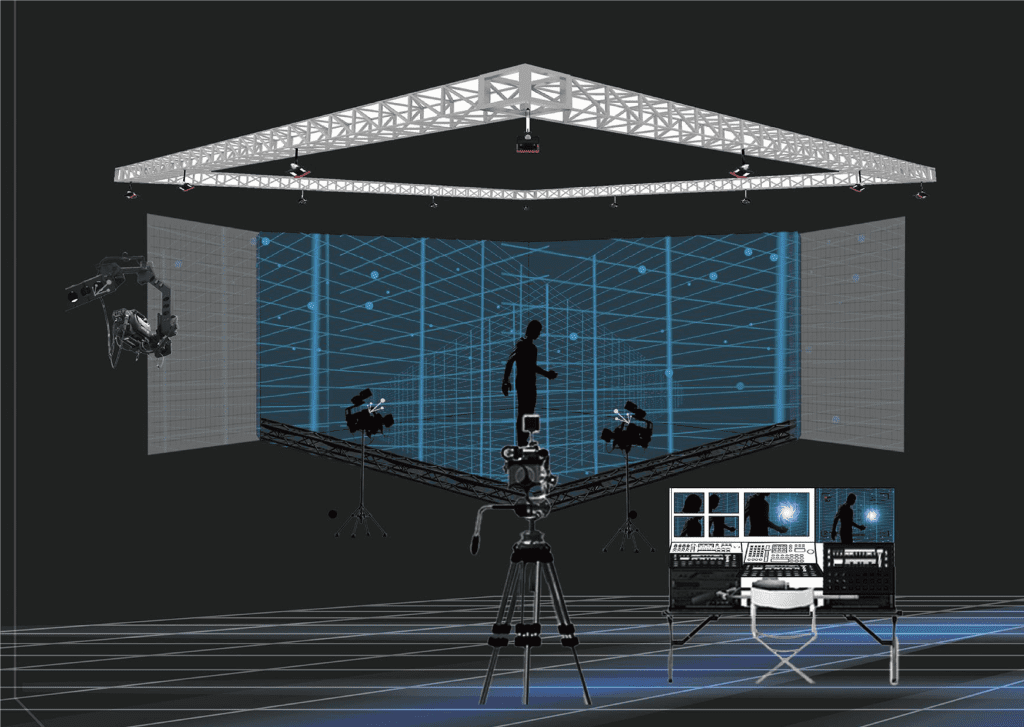
In response to this challenge, theProfessor Shuguang Kuai's research team from the School of Psychological and Cognitive Sciences and the Institute of Brain Science and Educational Innovation at East China Normal University has successfully constructed a virtual realityAn ideal experimental scenario for measuring social behaviorThe effective quantification and modeling of human social walking behavior, and its algorithmic implantation into the navigation platform of robots, has achieved a three-stage leap from conceptualization, computation to engineering of human science theories.
Human social competence has an irreplaceable advantage over current artificial intelligence algorithms. This advantage is best demonstrated in the natural behavior of walking.
"Hypothetically, in a social scenario, humans would walk based on modesty and try to avoid interfering with the social interactions of others, even though doing so might cause us to take long detours and consume more time and energy."
This kind of behavior and decision making, which is not common for humans, is quite a challenge for robots. How to make robots have human-like social capabilities, so as to enhance the anthropomorphic nature of robots and the experience of human-robot interaction is an important challenge that needs to be solved in the current field.
From human social behavior to robotic navigation algorithms
In response to this challenge, this research work aims to address two important scientific and technical questions within this framework.The first is how to quantify and model human social walking behavior and build quantitative models to predict human walking paths, and the second is how to implant these models into engineering algorithms to achieve enhancements to robot navigation algorithms.
In response to the first problem, although the fields of psychology, anthropology, and sociology have paid attention to human social interaction behavior for a long time and established many theories. However, these theories mostly stay at the level of phenomenal descriptions and lack complete quantitative computational models.
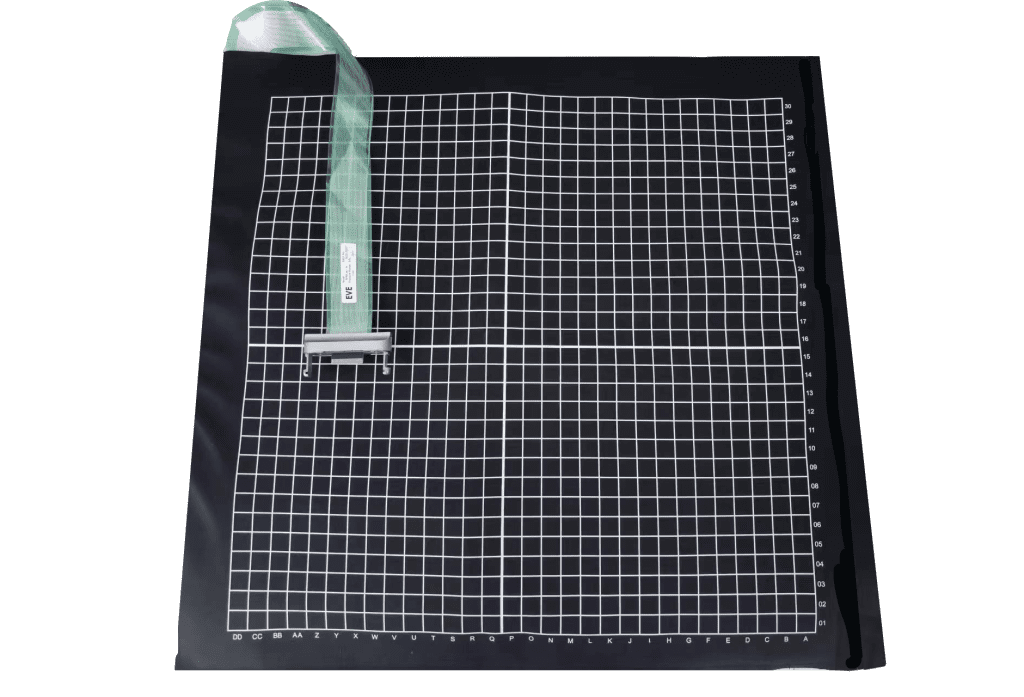
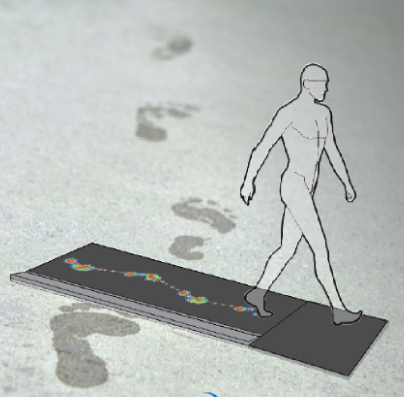
The research team cleverly used cutting-edge virtual reality technology combined with traditional experimental psychology research methods to construct an ideal social walking experimental scenario in a virtual scene, and used this experimental scene to quantitatively measure human social interaction space and social walking characteristics. On the basis of the behavioral experimental results, the team members further used computational modeling to construct a mathematical model of human walking behavior, and proposed a Social Locomotion Model based on individual social space, and demonstrated the robustness of the model in complex social scenarios in several virtual environments and real dynamic scenarios.

A social walking model based on human social space
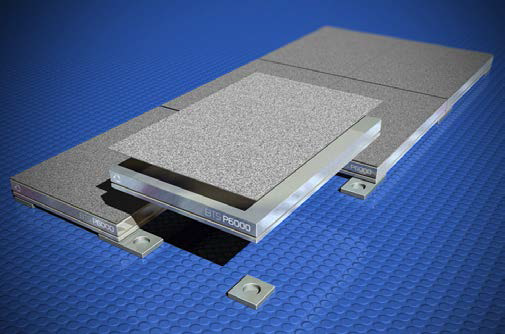
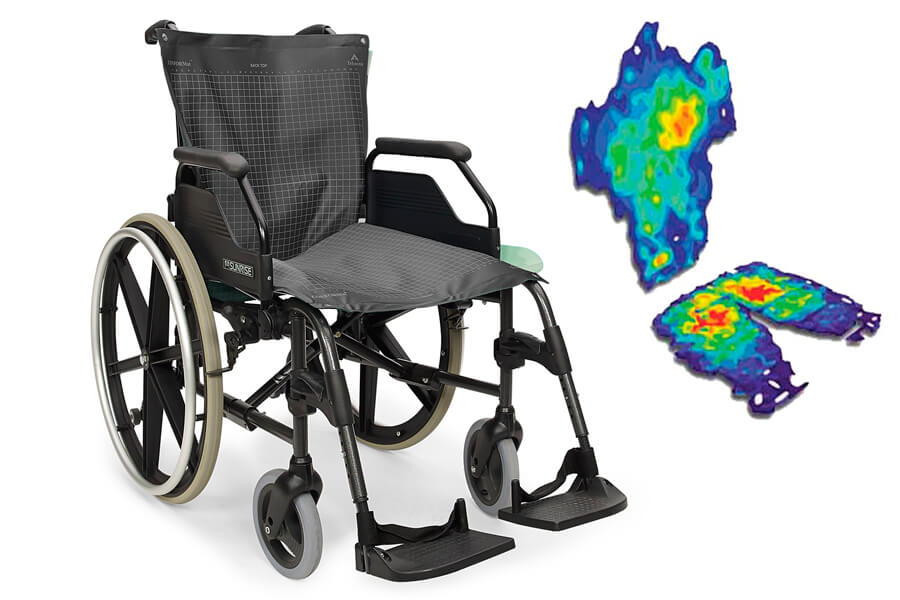
To address the second problem, the research team, after obtaining a computational model of social walking behavior, algorithmized the model based on practical engineering needs and implanted it into the robot platform for validation and optimization to test whether the algorithm based on human intelligence can enhance human evaluation of the robot's social and humanoid nature.
The results of the study demonstrate in many ways that computational models based on human behavioral characteristics can effectively enhance the experience of human-robot interaction, as well as the anthropomorphic and social nature of robots.

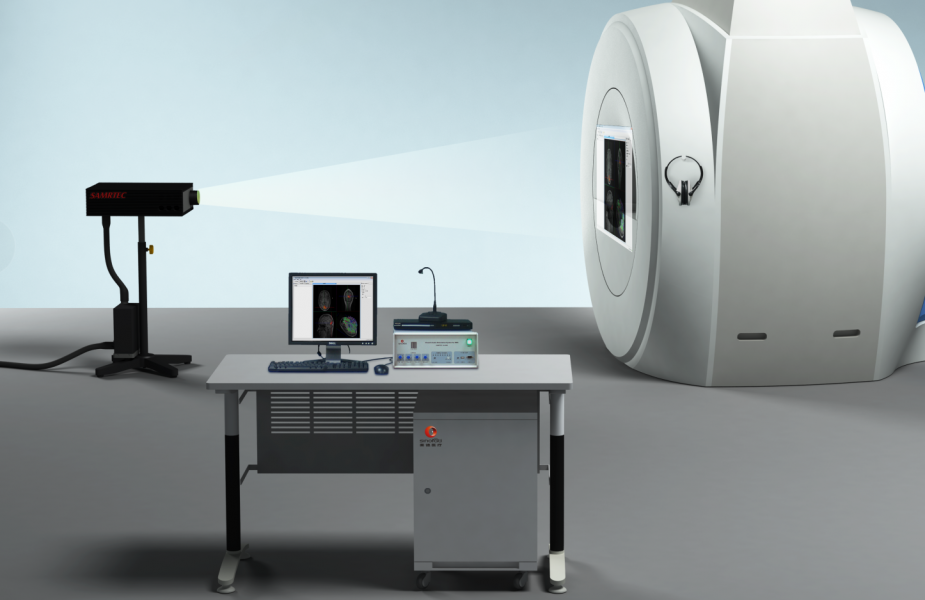
Behavioral assessment platform for robots
New breakthroughs in cross-disciplinary fields
With the development of socio-economic level and the improvement of people's living standard, the development of science and technology has moved from simply enhancing production capacity to leading the high-quality and harmonious development of human society. In such a new historical period, the importance and necessity of cross-fertilization of arts and science disciplines has become more and more prominent.

Some members of the research team (from left: Mingyuan Yan, Mingcheng Miao, Shuguang Kuai, Chen Zhou, Qi Jan)
The results of this cross-cutting scientific research spanning the humanities, sciences and engineering were recently published in the leading international computer science journal Nature - Machine Intelligence (Nature Machine Intelligence) was published. Prof. Shuguang Kuai is the corresponding author of the paper, postdoctoral student Chen Zhou is the first author of the paper, and PhD student Mingcheng Miao, undergraduates Xinran Chen and Yifei Hu, and current undergraduates Qi Yan and Mingyuan Yan are co-authors of the paper. This research was supported by the National Natural Science Foundation of China under the Excellent Youth Program (32022031), the Major Project of Basic Research of Shanghai Science and Technology Commission (19JC1410101), and the China Postdoctoral Science Foundation under the Surface Project (2021M701227).

The results of Prof. Shuguang Kuai's team at East China Normal University are published inNature Machine Intelligence
Based on psychological theory and technology, Professor Shuguang Kuai has built a multidisciplinary cross-fertilization research team by integrating virtual reality and computer science, dedicated to quantifying a series of abstracted and conceptualized humanities theories by means of the latest intelligent technologies, and using humanities ideas to stimulate and guide breakthroughs in science and technology. The research team has designed a series of new research paradigms to computationalize and engineer humanities theories in recent years, and the related results have been published in Psychology (Nature Human Behaviour), neuroscience (Journal of Neuroscience), and Computer Science (Nature Machine IntelligenceWe have become a distinctive research team in the field of interdisciplinary research in the arts and sciences by appearing in high-level international journals in the fields of science and technology.
Attachment.Human-behaviour-based social locomotion model improves the humanization of social robots
Source丨East China Normal University
























{kind=link}
{kind=link}
{kind=link}
{kind=link}